2.3 Ergebnisse
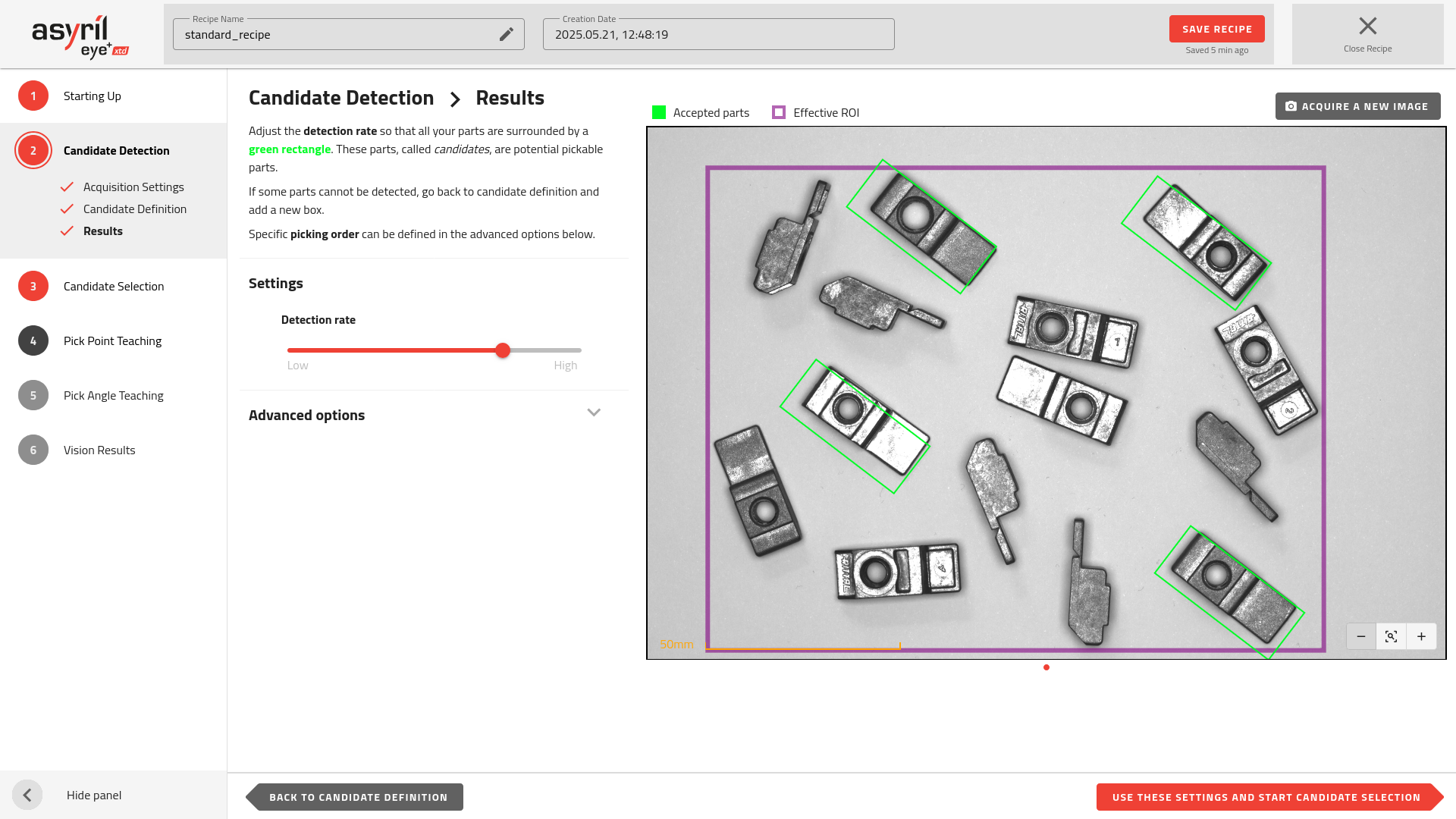
Abb. 64 Kandidatenerkennung - Ergebnisse
Auf der Seite Ergebnisse wird das Resultat des Algorithmus zur Kandidatenerkennung angezeigt, der auf die im vorherigen Schritt definierten Kandidaten angewendet wurde. Erkannte Teile sind mit grünen Rechtecken markiert und werden als Kandidaten bezeichnet. Sie stellen potenziell entnehmbare Teile dar.
Wenn einige Teile nicht erkannt werden, versuchen Sie zunächst, die Erkennungsrate zu erhöhen. Wenn dies das Problem nicht löst oder wenn unerwünschte Elemente erkannt werden, kehren Sie zum Schritt 2.2 Kandidatendefinition zurück und fügen Sie einen zusätzlichen Begrenzungsrahmen für die Kandidatenerkennung hinzu.
Wichtig
Wenn ein Teil am Ende dieses Schritts nicht von einem grünen Rechteck umgeben ist, wird es von allen folgenden Schritten ausgeschlossen. Dies bedeutet, dass es nicht vom Roboter entnommen wird, wenn sich die Position des Teils nicht verändert.
Tipp
Sie können die Teile manuell verschieben und dann auf die Schaltfläche „EIN NEUES BILD AUFNEHMEN“ drücken, um ein neues Bild zu analysieren und zu prüfen, ob die Kandidatenerkennung gut funktioniert.
Bemerkung
Das Ergebnisbild zeigt den Untersuchungsbereich (ROI) als lila Rechteck. Stellen Sie sicher, dass dieser Ihren Entnahmebereich vollständig umschliesst.
Erweiterte Optionen
Entnahmeabfolge
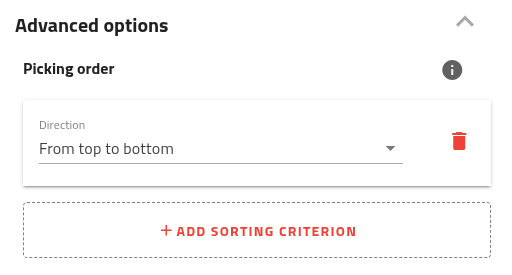
Abb. 65 Konfiguration der Entnahmeabfolge mit einer bereits eingestellten Richtung
Die Entnahmeabfolge definiert die Reihenfolge, in der die Koordinaten von EYE+ XTD während der Produktion zurückgegeben werden. Damit können Sie den Weg des Roboters optimieren oder erweiterte Szenarien ausführen, bei denen der Entnahmebereich auf eine bestimmte Weise geräumt werden muss.
Sie können bis zu zwei Sortierkriterien konfigurieren, sodass Sie entweder eine allgemeine Richtung oder eine gitterbasierte Reihenfolge festlegen können. Die verfügbaren Sortieroptionen sind:
Von oben nach unten
Von unten nach oben
Von links nach rechts
Von rechts nach links
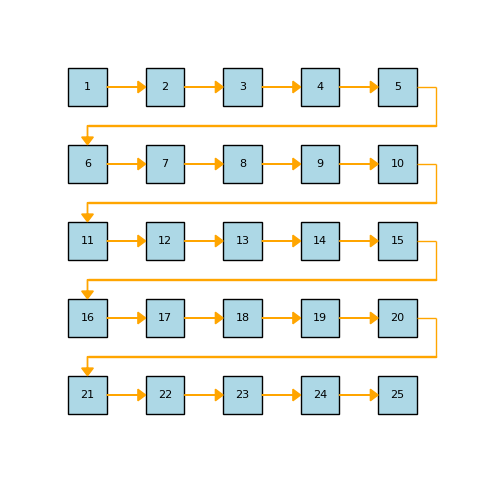
Abb. 66 Beispiel einer Entnahmeabfolge, definiert als: 1. Von links nach rechts 2. Von oben nach unten
Sobald mindestens ein Kriterium ausgewählt wurde, wird die Entnahmeabfolge auf dem Ergebnisbild angezeigt (Abb. 67).

Abb. 67 Ergebnisse mit angezeigter Entnahmeabfolge: 1. Von oben nach unten 2. Von rechts nach links
Bemerkung
Wenn keine Entnahmeabfolge definiert ist, werden die Teile automatisch nach ihrem Abstand zur Mitte des Entnahmebereichs sortiert, wobei die am nächsten liegenden Teile zuerst entnommen werden.