Étalonnage main-œil
Qu’est-ce que l’étalonnage main-œil ?
L’objectif de l’étalonnage main-œil est de transposer les coordonnées X,Y des pièces détectées du système de coordonnées de la vision vers celui du robot. Grâce à cela, lorsque le robot demande les coordonnées d’une pièce, celles-ci lui sont transmises directement dans son système de coordonnées. L’étalonnage main-œil est effectué en associant quatre points détectés par la vision avec les quatre positions correspondantes du robot.
Accéder à l’assistant d’étalonnage main-œil
L’étalonnage main-œil est la troisième étape de l’outil de prise en main (Fig. 13). Depuis la page , cliquez simplement sur pour ouvrir l’assistant.
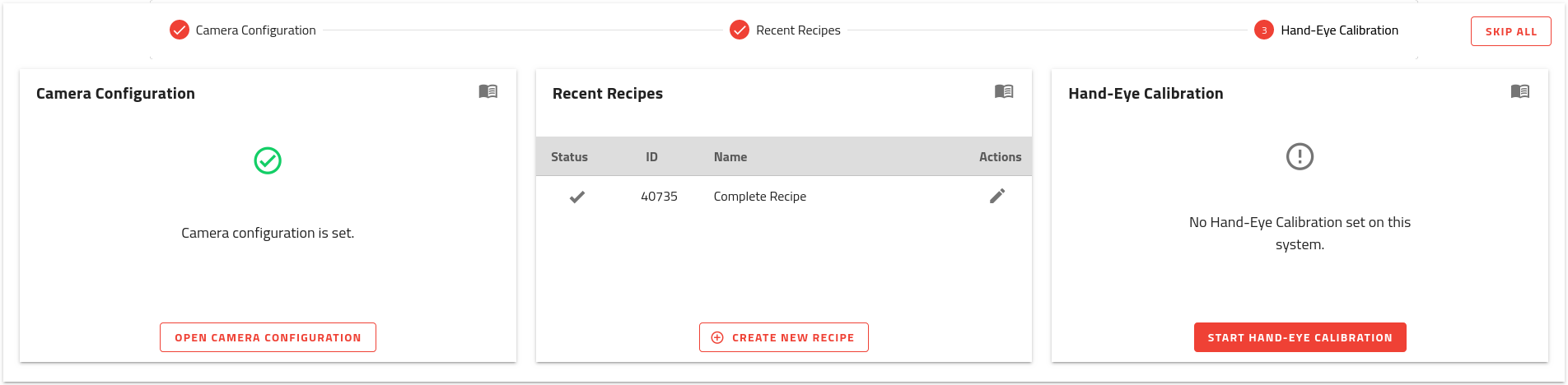
Fig. 16 Prise en main depuis la page d’ACCUEIL - Étape 3 - Étalonnage main-œil
Vous pouvez également accéder à l’étalonnage main-œil depuis la page de CONFIGURATION. Ouvrez le menu , puis cliquez sur Robot et enfin sur .
Effectuer l’étalonnage main-œil
Suivez les étapes de l’assistant pour effectuer l’étalonnage main-œil.
Remarque
De plus amples informations sur l’étalonnage main-œil peuvent être trouvées dans le chapitre Assistant d’étalonnage main-œil.
Si vous retournez à la page , vous remarquerez que la dernière étape est également achevée (Fig. 17) et que le suivi des étapes de la prise en main a disparu.
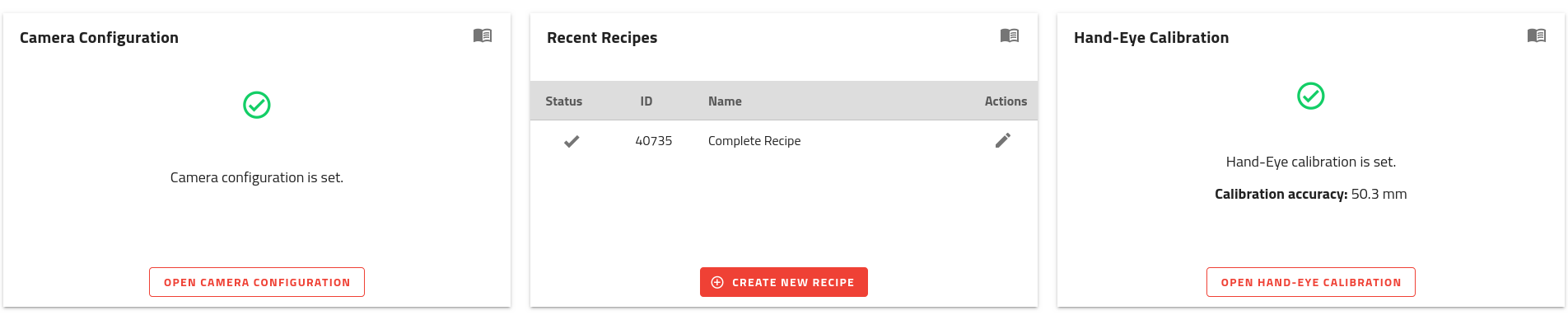
Fig. 17 Page d’ACCUEIL - Prise en main terminée
Vous êtes maintenant prêt pour obtenir la position de votre première pièce ! Passez à l’étape suivante.