Prélevez vos premières pièces
Votre système est désormais monté, calibré et configuré. Cette section présente le terminal TCP qui peut être utilisé pour tester votre système et vous présente le scénario de production de base.
Terminal TCP
Le terminal TCP est accessible depuis la Zone des ressources sur la page .
Vous pouvez également y accéder depuis la page d’AIDE. Cliquez sur et ensuite sur .
La page suivante (Fig. 18) apparaîtra.
Fig. 18 Terminal TCP
Les deux terminaux communiquent avec l’EYE+ XTD Controller par TCP/IP socket messaging (un socket par terminal).
L’EYE+ XTD Controller doit être en état prêt. Vérifiez l’état actuel en tapant la commande get_parameter <paramètre> (<valeur>…) avec state pour <paramètre>. La réponse doit être 200 ready.
Remarque
Si vous êtes en mode recipe edition, camera configuration, hand-eye calibration, ou déjà en mode production, vérifiez que vous n’avez aucune autre page EYE+ XTD Studio ouverte. Si cela devait être le cas, assurez-vous d’avoir tout enregistré et fermez les autres pages.
Scénario de production de base
La Fig. 19 montre le scénario de production de base.
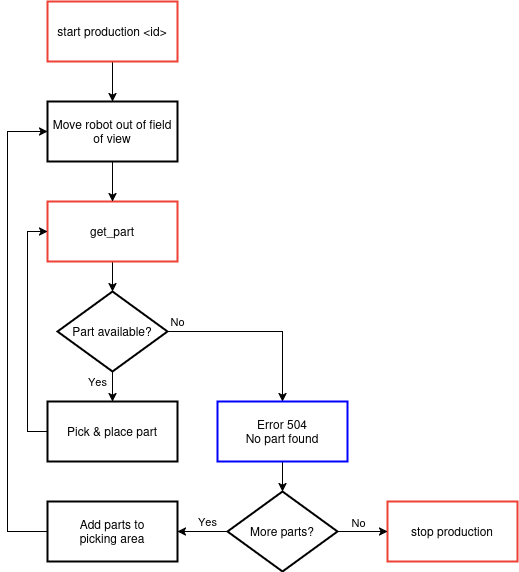
Fig. 19 Scénario de production de base
Envoyez la commande get_recipe_list. Cela affichera la liste des recettes existantes enregistrées sur l’EYE+ XTD Controller. Votre première recette devrait apparaître avec son nom et son identifiant.
Démarrez la production en envoyant start production avec l’identifiant de votre recette (p. ex.
<recipe_id>). Cela fera passer EYE+ XTD en état de production.Assurez-vous que le robot n’est pas dans le champ de vision de la caméra.
Mettez au moins une pièce sur la zone de dégagement et envoyez get_part. Vous recevrez un message similaire à :
200 x=0.12345 y=6.78910 rz=11.12, dans lequel200est une confirmation positive etx,y, etrzsont les coordonnées de la pièce détectée dans le système de coordonnées du robot.Déplacez le robot aux coordonnées reçues et prélevez la pièce.
Pour obtenir les coordonnées de la pièce suivante après la prise, il suffit d’envoyer à nouveau get_part.
Remarque
Si vous n’obtenez la réponse 200 à aucune des commandes, consultez les codes d’erreur pour obtenir plus d’informations sur votre problème et sur la façon de le résoudre.
Conseil
Vous pouvez ramener le système à l’état Prêt en envoyant stop <état> avec le paramètre d’état défini comme production (c’est-à-dire stop production).
Votre premier pick-and-place
Vous êtes maintenant prêt à implémenter votre premier programme robot/API pour communiquer avec EYE+ XTD.
Vous pouvez utiliser toutes les commandes décrites dans la section Commandes.
Différents scénarios de production sont décrits dans la section Scénarios de production.