Warnung
Sie lesen eine alte Version dieser Dokumentation. Wenn Sie aktuelle Informationen wünschen, schauen Sie bitte unter 1.1 .5.4 Ergebnisse
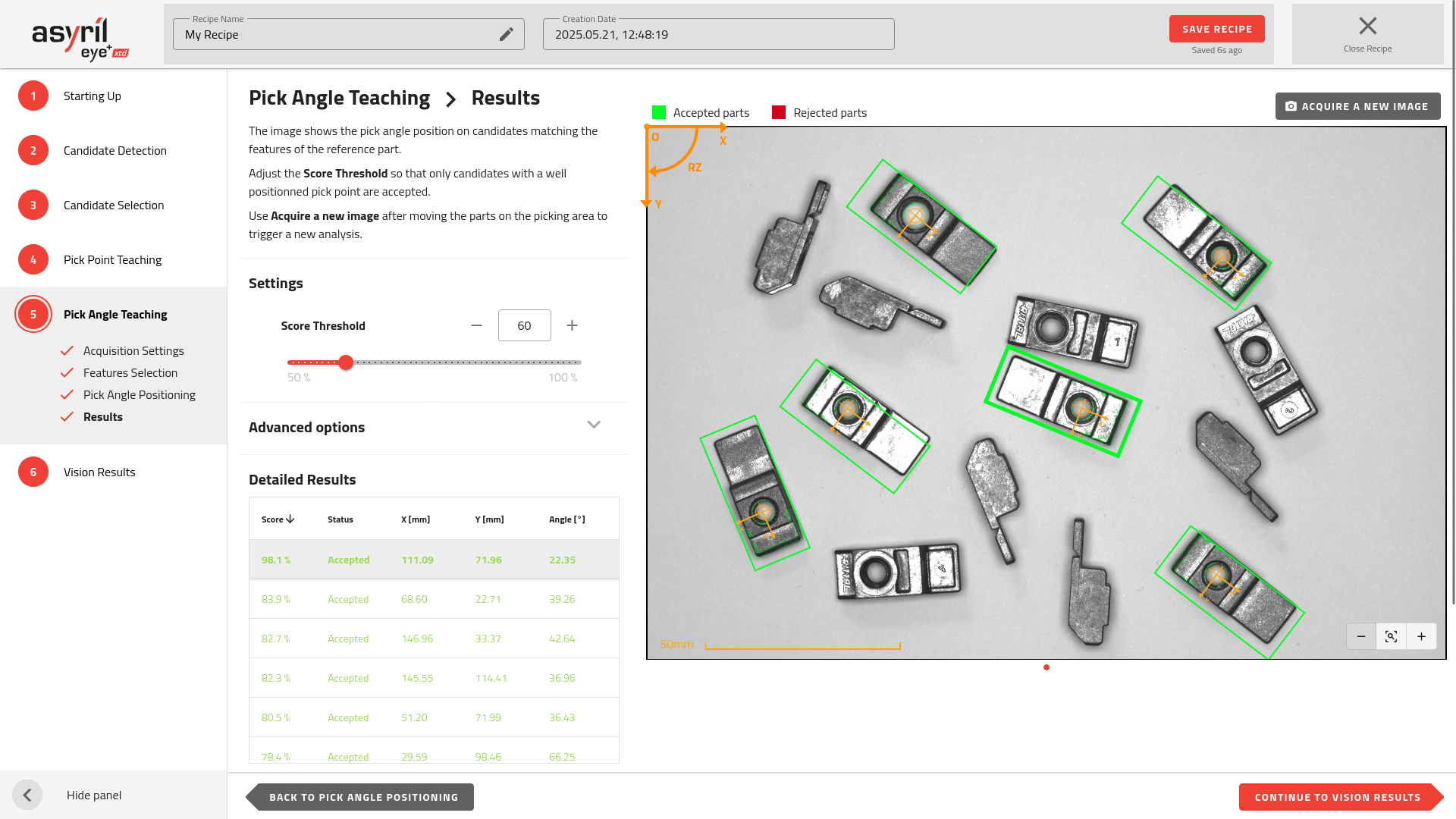
Abb. 110 Einlernen des Entnahmewinkels - Ergebnisse
In diesem Schritt bewertet das System, wie gut das Referenzmodell, das durch die ausgewählten Eigenschaften definiert ist, mit den anderen guten Kandidaten übereinstimmt.
Das Referenzmodell wird gedreht und ausgerichtet, um die bestmögliche Übereinstimmung mit den auf jedem Teil erkannten Eigenschaften zu finden. Dies gewährleistet eine konsistente und präzise Positionierung des Entnahmewinkels, auch bei unterschiedlicher Ausrichtung der Teile.
Das System verwendet dann den definierten Entnahmewinkel, um die Rz-Koordinate an den Roboter zurückzugeben.
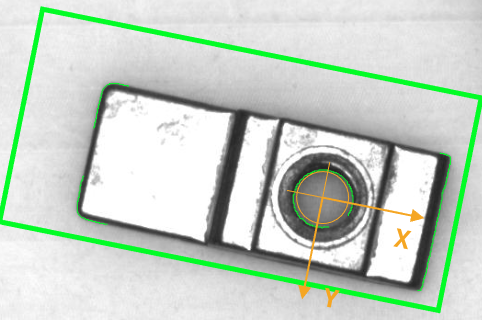
Abb. 111 Ergebnis des Einlernens des Entnahmewinkels - Zoom auf ein Teil
Tipp
Sie können die Teile manuell auf dem Entnahmebereich bewegen und dann auf die Schaltfläche Ein neues Bild aufnehmen klicken, um zu prüfen, ob der Entnahmewinkel über verschiedene Positionen hinweg genau erkannt wird.
Jeder Kandidat erhält eine Auswertung, die den Prozentsatz der Übereinstimmung zwischen seinen Eigenschaften und dem Referenzmodell angibt. Eine Auswertung von 100% bedeutet eine perfekte Übereinstimmung.
Tipp
In der Ergebnistabelle können Sie die Teile nach Auswertung sortieren. So können Sie schnell überprüfen, dass nur Teile mit hohen Prozentwerten akzeptiert werden. Passen Sie den Schwellenwert an, um sicherzustellen, dass nur korrekt erkannte Teile (mit grünen Rechtecken hervorgehoben) beibehalten werden.
Erweiterte Optionen
Über die erweiterten Optionen können Sie bis zu vier Ausschlussbereiche definieren.
Bemerkung
Ein Ausschlussbereich umfasst ein Paar von Winkeln. Wenn die Ausrichtung eines Teils in einem dieser Bereiche fällt, wird das Teil zurückgewiesen.
Sie können einen Ausschlussbereich mit Werten von -360° bis 360° definieren. Intern arbeitet das Bildverarbeitungssystem jedoch mit dem Bereich [0°, 360°]. Aus diesem Grund wird beim Speichern des Bereichs jeder negative Winkel automatisch in den entsprechenden positiven Wert umgewandelt, indem 360° addiert werden.
Der Ausschlussbereich „[-30°; 30°]“ wird zum Beispiel als „[330°; 30°]“ gespeichert.
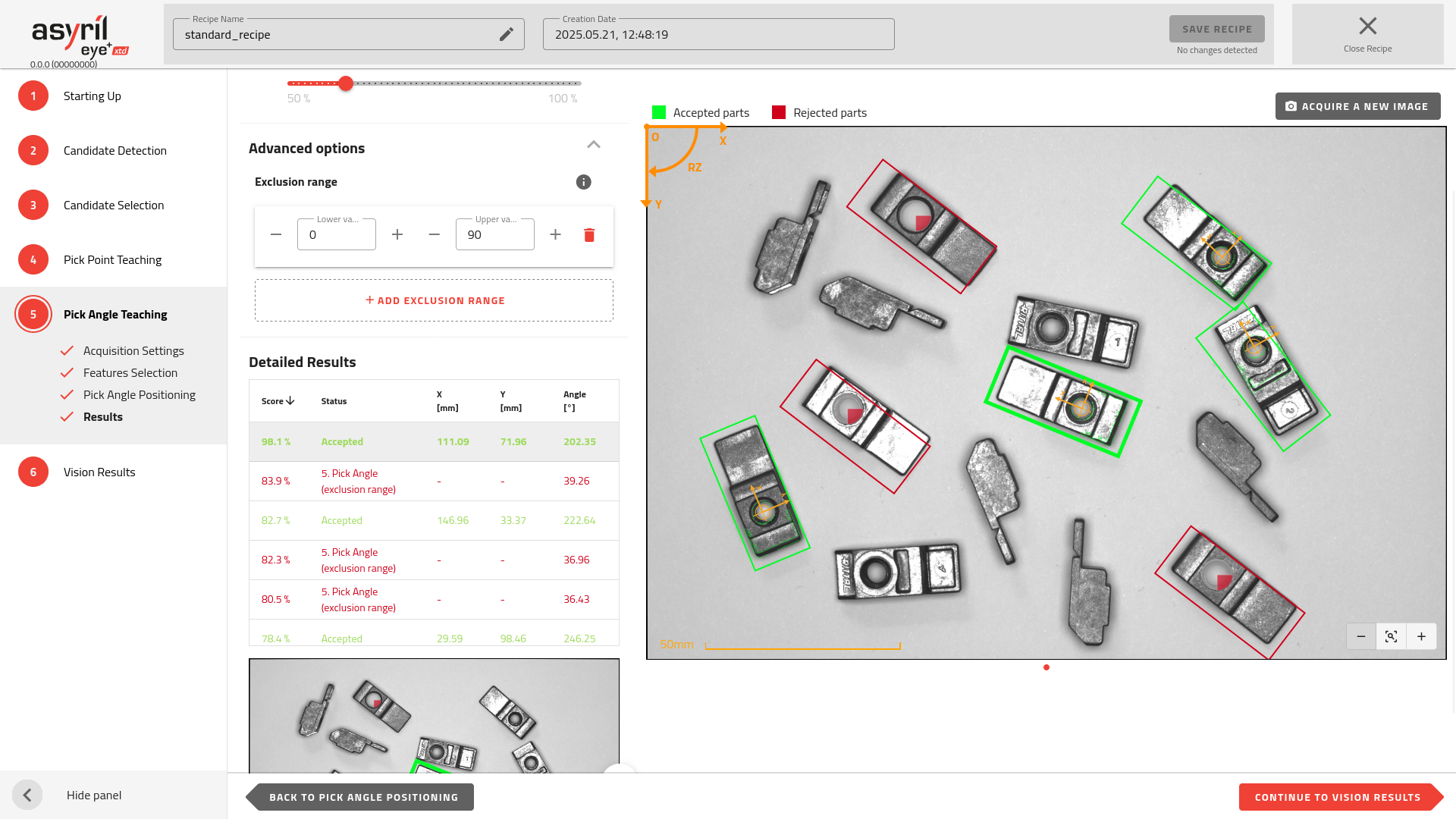
Abb. 112 Ergebnis des Einlernens des Entnahmewinkels mit einem Ausschlussbereich von [0; 90]
Wichtig
Im Rezeptassistenten werden die Winkel im Vision-Arbeitsraum ausgedrückt, wie er durch das Koordinatensystem oben links im Bild definiert ist. In der Produktion hingegen gibt EYE+ XTD die Winkel im Koordinatensystem des Roboters an, wie sie durch die Hand-Augen-Kalibrierung berechnet werden.