4.4 Résultats
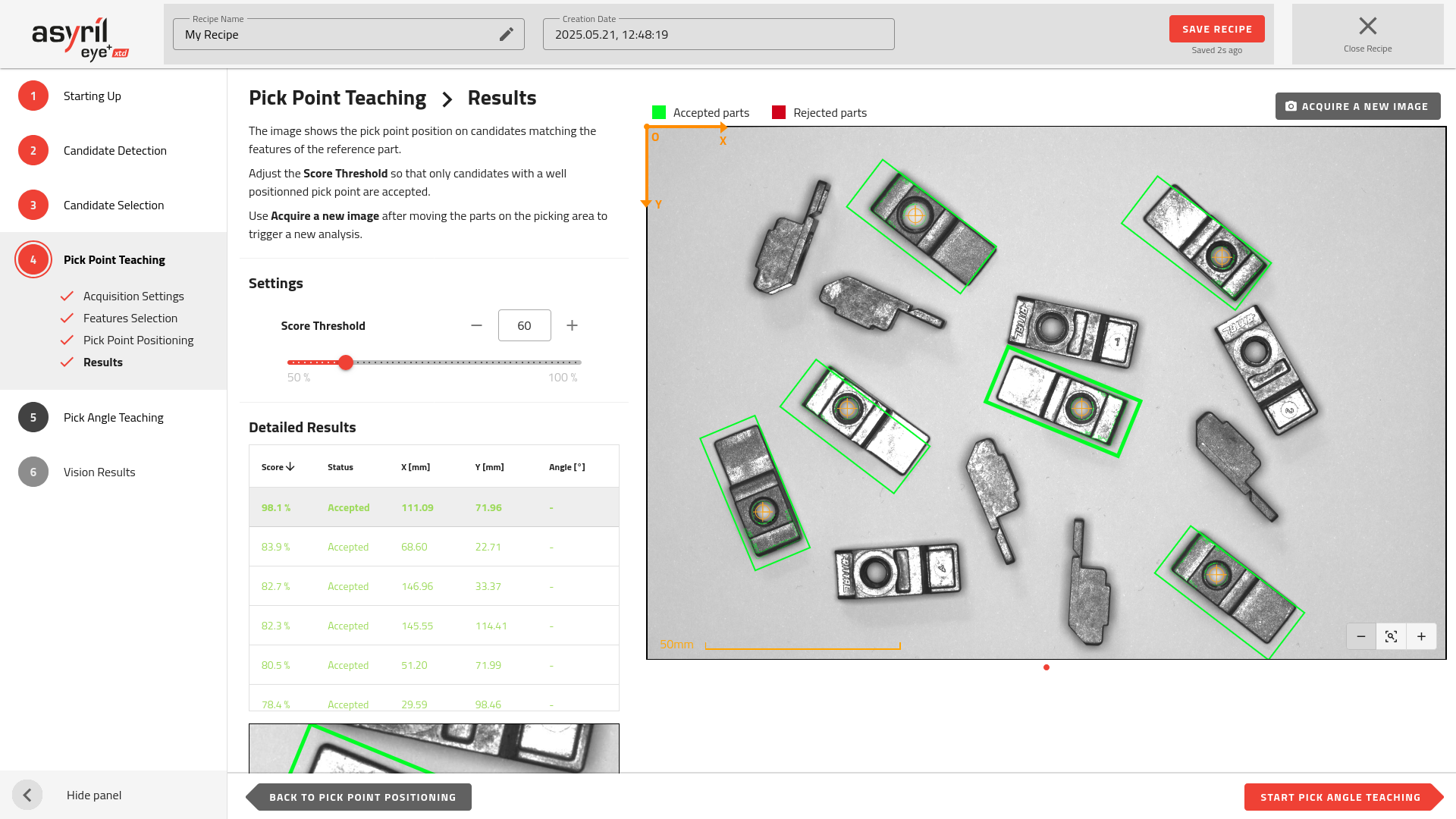
Fig. 96 Apprentissage du point de prise - Résultats
Au cours de cette étape, le système évalue dans quelle mesure le modèle de référence, défini par les caractéristiques sélectionnées, correspond aux autres bons candidats.
Le modèle de référence est tourné et aligné pour trouver la meilleure correspondance possible avec les caractéristiques détectées sur chaque pièce. Cela garantit un positionnement cohérent et précis du point de prise, même en cas de variation de l’orientation des pièces.
Le système utilisera ensuite le point de prise défini pour renvoyer les coordonnées X et Y au robot.
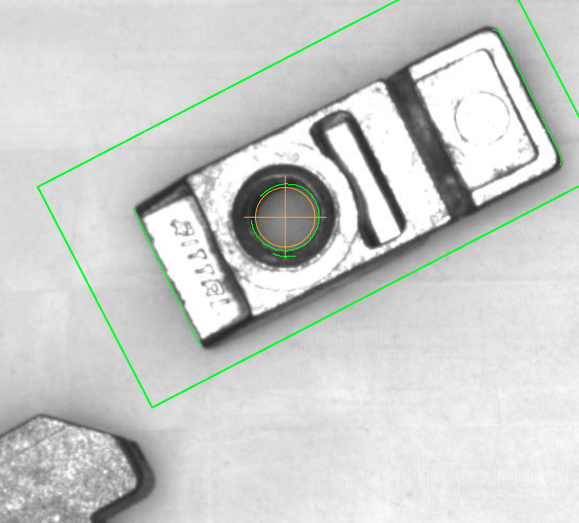
Fig. 97 Zoom sur un bon candidat
Conseil
Vous pouvez déplacer manuellement les pièces sur la zone de dégagement et appuyer sur Acquérir une nouvelle image pour vérifier si le point de prise est toujours détecté avec précision dans différentes positions.
Chaque candidat se voit attribuer un score, représentant le pourcentage de correspondance entre ses caractéristiques et le modèle de référence. Un score de 100% indique une correspondance parfaite.
Conseil
Utilisez le tableau des résultats pour trier les pièces par score. Cela vous permet de vérifier rapidement que seules les pièces ayant un score élevé sont acceptées. Ajustez le seuil pour vous assurer que seules les pièces détectées avec précision (mises en évidence par des rectangles verts) sont retenues.