警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .初めての部品ピック
ここまでで、システムの「取り付け」「キャリブレーション」そして「設定」の説明がすでに完了しました。ここでは、システムのテストに使用する TCP ターミナルと、標準自動運転のフローを紹介します。
TCPターミナル
TCP ターミナルは ページの 「リソース」エリア からアクセスできます。
「ヘルプ」ページからもアクセスできます。 をクリックし、 をクリックしてください。
次のページが( 図 18)が表示されます。
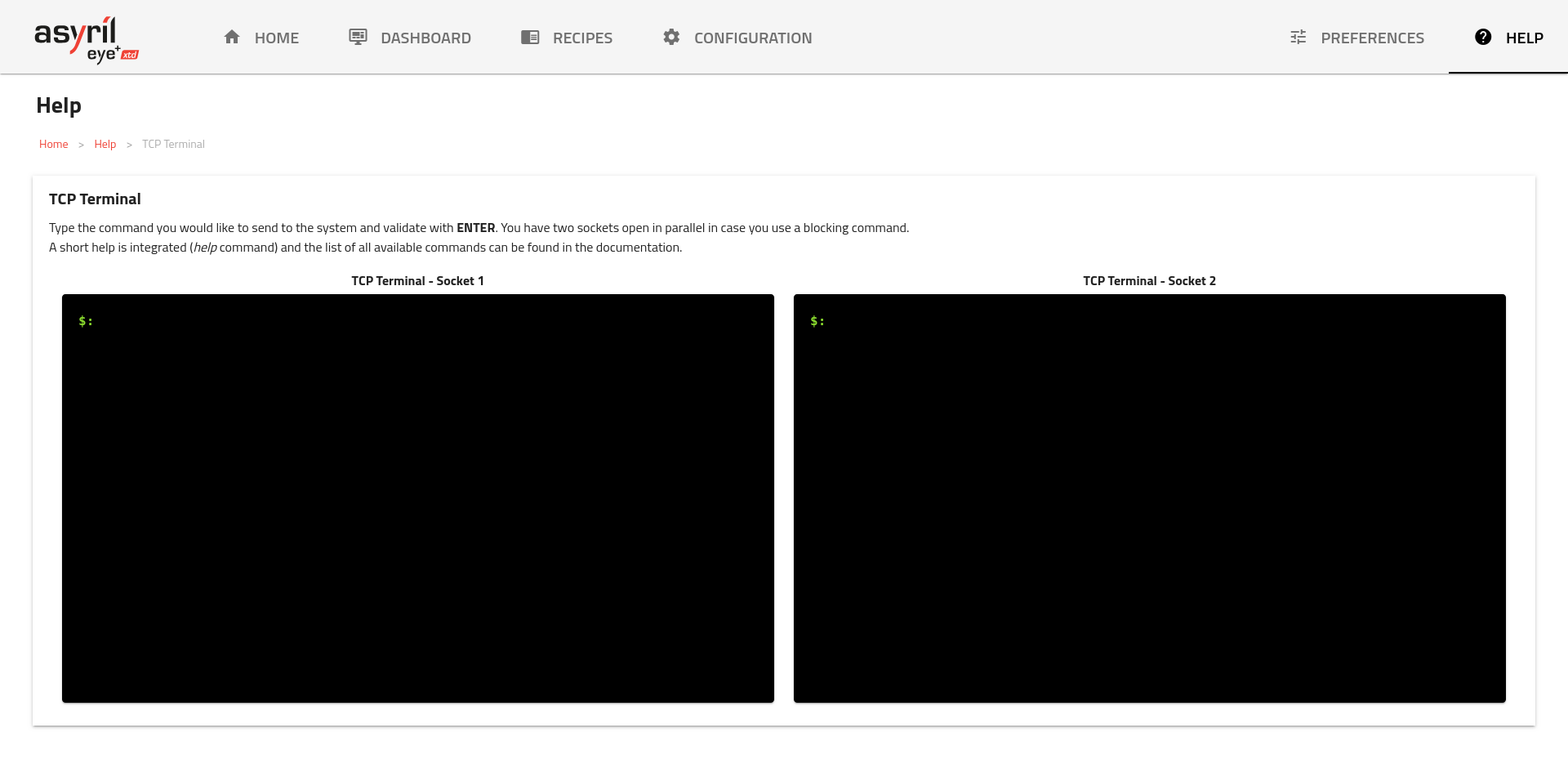
図 18 TCPターミナル
2つのターミナルは、TCP / IP ソケットメッセージング(1つのターミナルにつき1つのソケット)を介してコントローラと通信します。
コントローラは 準備完了 の状態でなければなリません。 get_parameter <parameter> (<value>...) を送信して現在の状態を確認してください( <パラメータ> が 状態 )。 200 準備完了 と応答があるはずです。
注釈
「レシピ編集」「カメラ設定」「ハンドアイキャリブレーション」、または「生産」状態にある場合は、他の EYE+ XTD Studio ページが開いていないことを確認してください。もし他のページが開いている場合は、すべての作業を保存し、ページを閉じてください。
標準自動運転のフロー
図 19 は、標準自動運転のフロー図です。
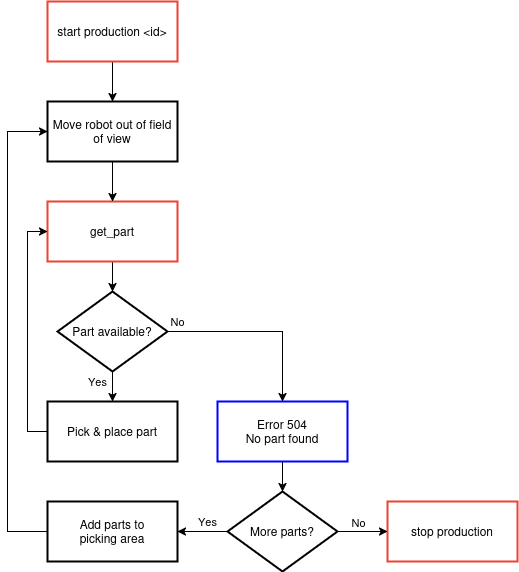
図 19 標準自動運転のフロー
コマンド get_recipe_list を送信して、|コントローラ| に保存されている既存のレシピ一覧を表示してください。最初のレシピが名前とID とともに表示されるはずです。
レシピ ID(例:<recipe_id>)を指定して、自動運転を開始する コマンドを送信し、自動運転を開始してください。これにより、EYE+ XTD は自動運転状態に切り替わります。
ロボットがカメラの視野内に入らないようにしてください。
ピッキングエリアに少なくとも1つ部品を置き、 get_part コマンドを送信してください。すると、以下のようなメッセージが返されます:200 x=0.12345 y=6.78910 rz=11.12 。ここで「200」は成功を示し、x 、 y 、 rz は検出された部品のロボット座標系での位置を表します。
受け取った座標にロボットを移動させて、部品をピックしてください。
部品をピックした後、次の部品の座標を取得するには、再度 get_part コマンドを送信してください。
注釈
どのコマンドからも「200」の応答が得られない場合は、問題の詳細や対処方法について error_codes を参照してください。
ヒント
状態パラメータを 自動運転 に設定して 停止する コマンド(例:自動運転を停止する)を送信すると、システムを ready 状態に戻せます。
初めてのピック & プレース
これで、初めて EYE+ XTD と通信するロボット/PLCプログラムを実行する準備が完了しました。