2.3 Résultats
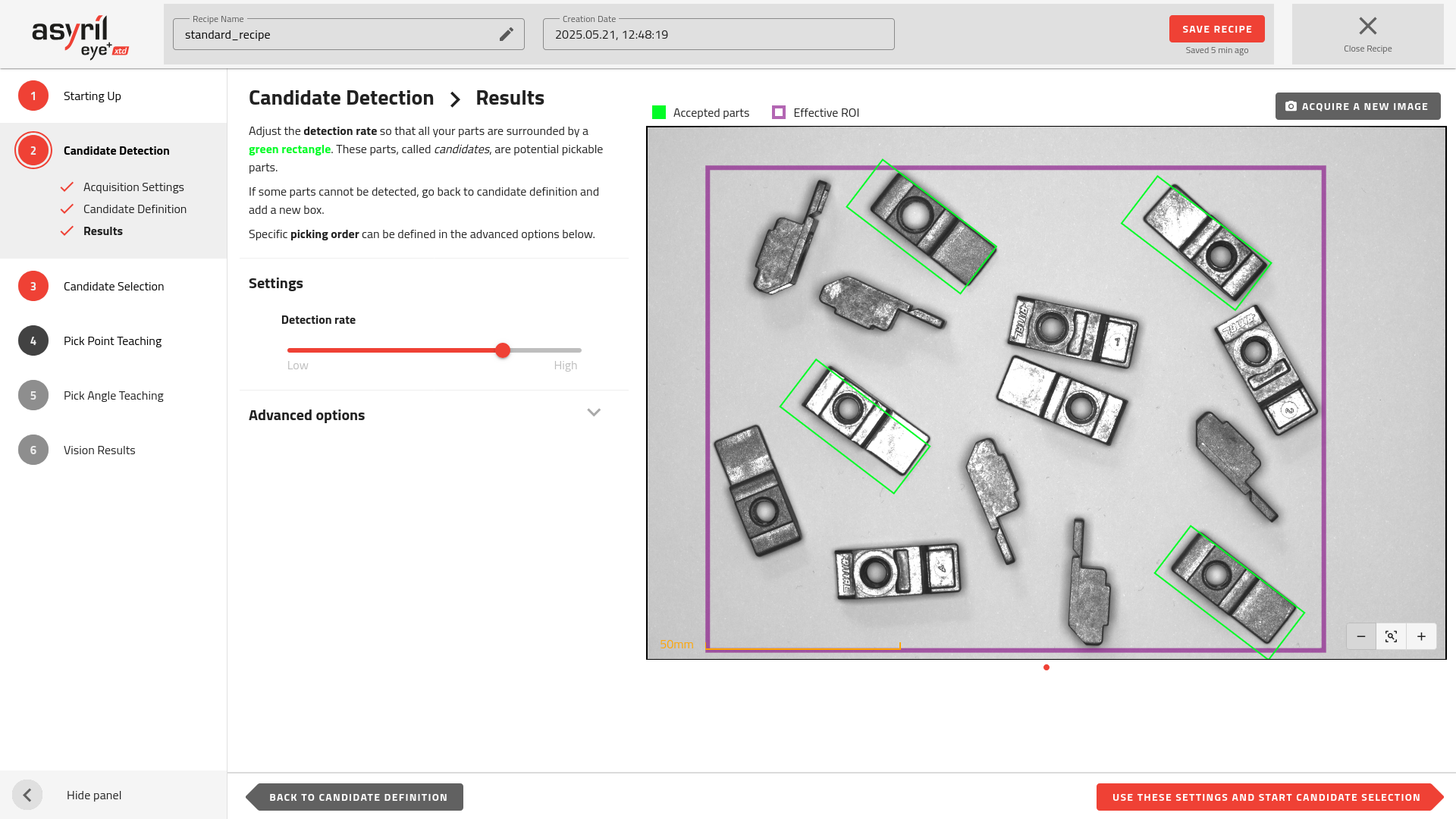
Fig. 64 Détection des candidats - Résultats
La page Résultats affiche les résultats de l’application de l’algorithme de détection aux candidats définis à l’étape précédente. Les pièces détectées sont marquées d’un rectangle vert et sont appelées candidats, représentant les pièces pouvant être prélevées.
Si certaines pièces ne sont pas détectées, essayez d’abord d’augmenter le taux de détection. Si cela ne résout pas le problème ou si des éléments indésirables sont détectés, revenez à l’étape 2.2 Définition des candidats et ajoutez un cadre de définition de candidats supplémentaire.
Important
Si une pièce n’est pas entourée d’un rectangle vert à la fin de cette étape, elle sera rejetée pour toutes les étapes suivantes, ce qui signifie qu’elle ne sera pas prélevée par le robot tant que sa position ne change pas.
Conseil
Vous pouvez déplacer manuellement les pièces, puis appuyer sur le bouton pour analyser une nouvelle image et vérifier si la détection des candidats fonctionne bien.
Remarque
L’image des résultats montre la Région d’intérêt (ROI) sous la forme d’un rectangle violet. Assurez-vous que ce rectangle englobe entièrement votre zone de dégagement.
Options avancées
Ordre de prise
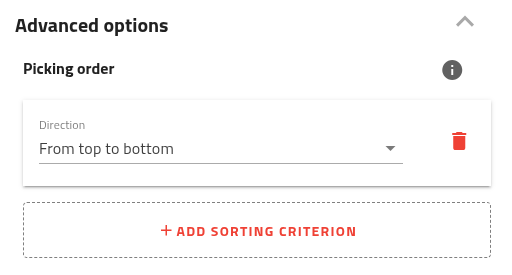
Fig. 65 Configuration de l’ordre de prise avec une direction définie
L’ordre de prise définit l’ordre dans lequel les coordonnées sont renvoyées par EYE+ XTD au cours de la production. Il permet d’optimiser la trajectoire du robot ou d’exécuter des scénarios avancés dans lesquels la zone de dégagement doit être dégagée d’une manière spécifique.
Vous pouvez configurer jusqu’à deux critères de tri, ce qui vous permet de spécifier une direction générale ou un ordre basé sur une grille. Les options de tri disponibles sont les suivantes :
De haut en bas
De bas en haut
De gauche à droite
De droite à gauche
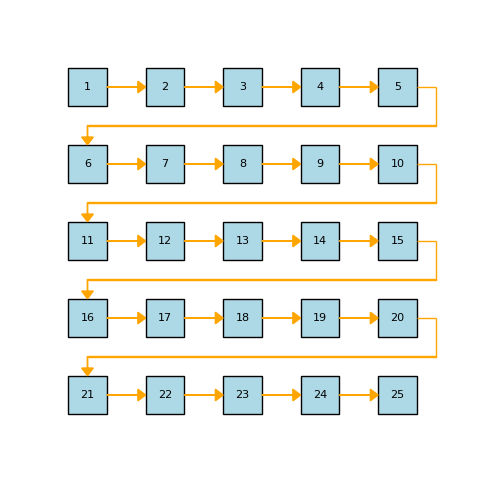
Fig. 66 Exemple d’un ordre de prise défini comme suit : 1. De gauche à droite 2. De haut en bas
Une fois qu’au moins un critère est sélectionné, l’ordre de prise sera affiché sur l’image des résultats (Fig. 67).

Fig. 67 Résultats avec affichage de l’ordre de prise : 1. De haut en bas 2. De droite à gauche
Remarque
Si aucun ordre de prélèvement n’est défini, les pièces sont automatiquement triées en fonction de leur distance par rapport au centre de la zone de dégagement, les pièces les plus proches étant prélevées en premier.