警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .初期設定のシナリオ
このシナリオでは、ロボットはモデルに関係なく任意の部品をピックできます。したがって、 モデル数(model_quantity) パラメータは不要です。 get_part コマンドは、最初に見つかった部品を返します。
コマンド get_part の戻り値には、対応するモデルが含まれています。戻り値からモデル番号を解析・抽出する方法については、当該コマンドのドキュメントを参照してください。
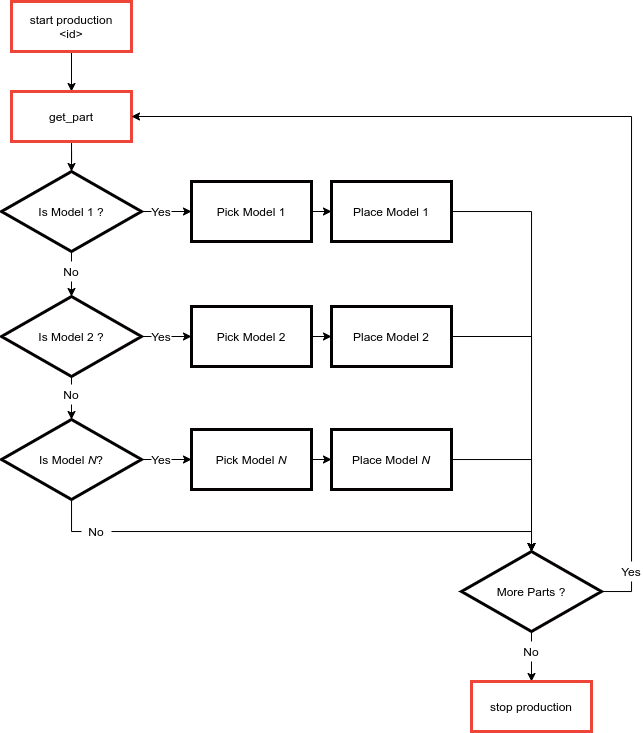
図 199 マルチモデルのための自動運転のシナリオ