警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .部品(ワーク)をピックする(Get part)
get_part ( 図 194) コマンドを使うと、自動運転サイクルを簡単に実行できます。
注釈
このシンプルなシナリオでは、サイクルタイムは最適化できませんが、構築自体は複雑ではありません。
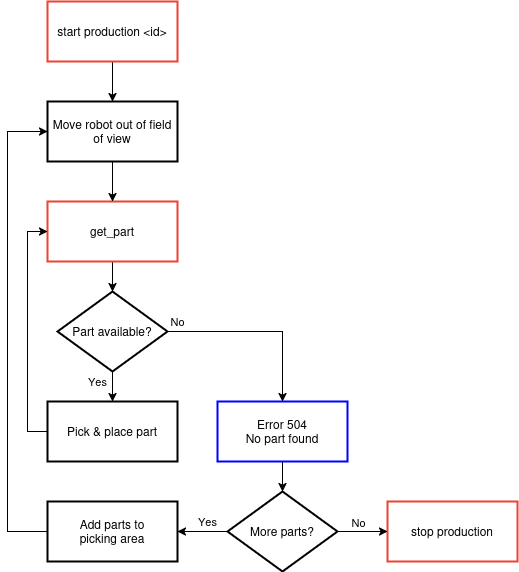
図 194 get_part を使用する自動運転のシナリオ
** [Move robot out of field of view] ** get_part コマンドを実行する前に、カメラの視界を遮るものがないことを確認してください。
** [get_part]:** :ref:get_part コマンドを呼び出してください。画像を撮影する場合があります。部品の座標を送信するか、部品がない場合はエラーを返します。
** [Pick & place part]:** ピック & プレースを行います。
ステップ2からやり直してください。もし エラー 504 が返された場合は、ピッキングエリアに部品を追加してステップ1から再開するか、または 自動運転を停止する コマンドで自動運転を停止してください。