警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .部品数(Part quantity = <n>)
部品数(part_quantity) パラメータは、EYE+ XTD に複数の部品を同時に探すよう指示するために使われます。つまり、EYE+ XTD が画像を撮るたびに、その画像上で少なくとも <n> 個の部品を探します。もし部品が見つからなければ、座標は送信されません。
このパラメータは、コマンド get_part および prepare_part の動作に影響を与えます。
重要
EYE+ XTD がお客様にn個の座標値を送ると、次のステップではこれらの部品がすべてピックアップされると想定できます。その場合は、それらの部品の座標値は良い候補リストから消去されます。
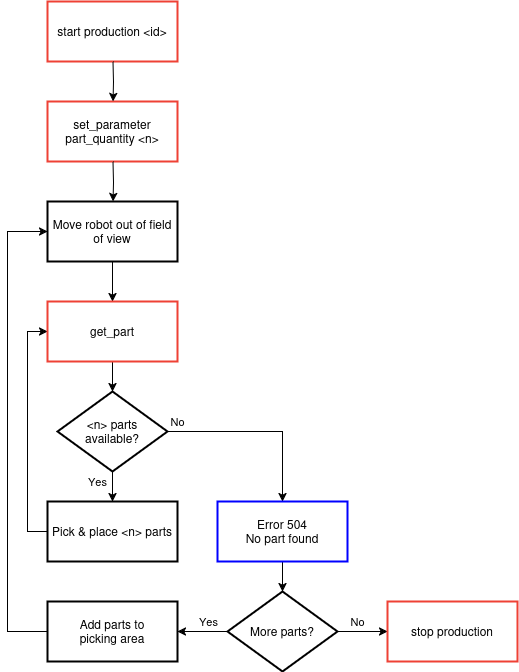
図 195 get_part と part_quantity = <n> を使った自動運転シナリオ
** [set_parameter part_quantity <n>] ** 部品数(part_quantity) パラメータを <n> に設定します。
** [Move robot out of field of view] ** get_part コマンドを実行する前に、カメラの視界を遮るものがないことを確認してください。
** [get_part] ** コマンド :ref:get_part を呼び出してください。画像を撮影する場合があります。このコマンドは <n> 個の部品の座標を送信するか、十分な部品が見つからない場合はエラーを返します。
** [Pick & place <n> parts] ** 最初の <n> 個のパーツをピック & プレースします。
ステップ3からやり直してください。もし エラー 504 が返された場合は、ピッキングエリアに部品を追加してステップ2から再開するか、または 自動運転を停止する コマンドで自動運転を停止してください。