Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 1.1 .5.4 Results
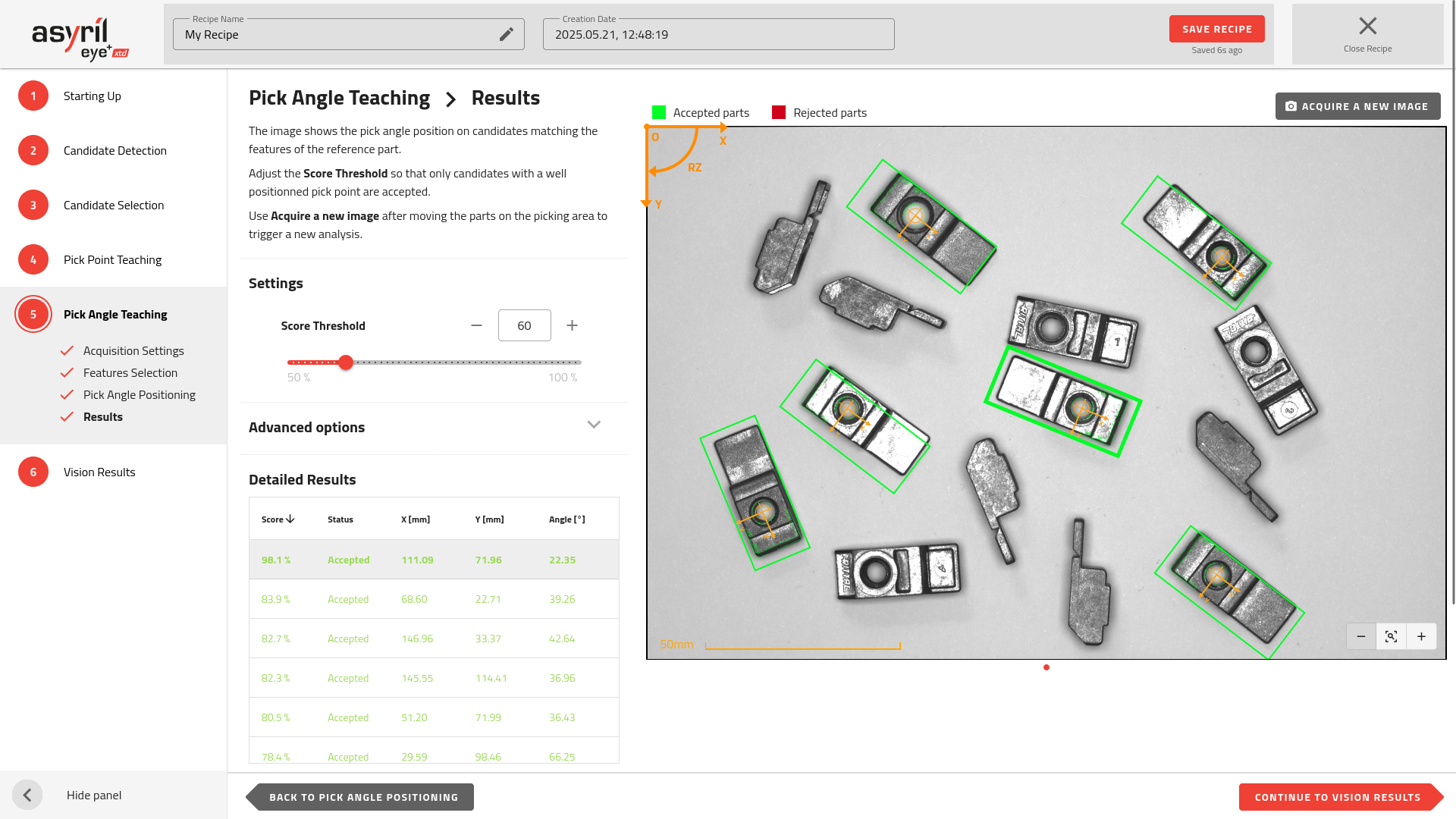
Fig. 110 Pick Angle Teaching - Results
In this step, the system evaluates how well the reference model, defined by the selected features, matches the other good candidates.
The reference model is rotated and aligned to find the best possible match with the features detected on each part. This ensures consistent and precise pick angle positioning, even across variations in part orientation.
The system will then use the defined pick angle to return the Rz coordinate to the robot.
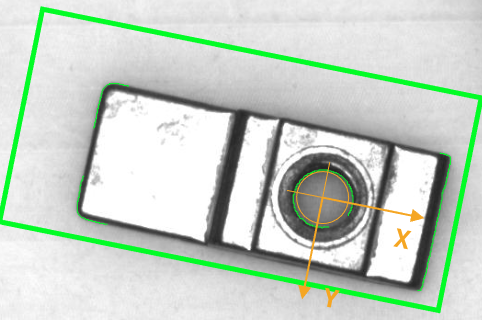
Fig. 111 Pick angle teaching result - zoomed in on one part
Tip
You can manually move parts on the picking area and press Acquire a new image to test whether the pick angle remains accurately detected across different positions.
Each candidate is given a score, representing the percentage of match between its features and the reference model. A score of 100% indicates a perfect match.
Tip
Use the results table to sort parts by score. This allows you to quickly verify that only parts with high scores are accepted. Adjust the threshold to ensure that only accurately detected parts (highlighted with green rectangles) are retained.
Advanced options
The advanced options allow you to define up to four angular exclusion ranges.
Note
Each exclusion range is defined by a pair of angles. If a part’s orientation falls within one of these ranges, it will be rejected.
You can define an exclusion range using values from -360° to 360°. Internally, however, the vision system operates in the [0°, 360°] range. For this reason, any negative angle will automatically be converted to its equivalent positive value by adding 360° when the range is saved.
For example, the exclusion range “[-30°; 30°]” will be stored as “[330°; 30°]”.
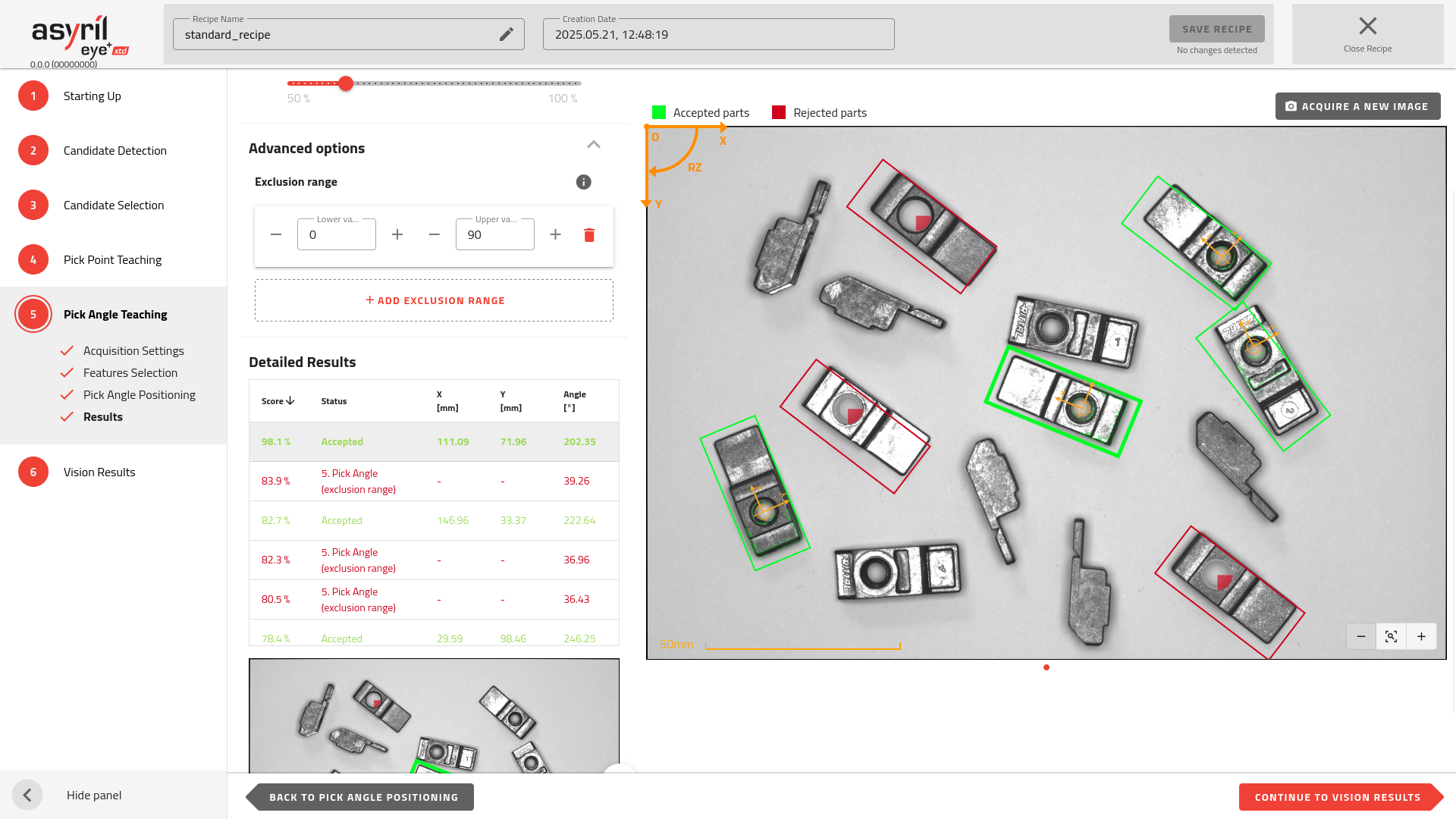
Fig. 112 Pick angle teaching results with an exclusion range set to [0; 90]
Important
In the recipe wizard, the angles are expressed in the vision reference frame as defined by the coordinate system on the top left of the image. In production however, EYE+ XTD will return the angles in the robot frame, as calculated by the hand-eye calibration.