Warning
You are reading an old version of this documentation. If you want up-to-date information, please have a look at 1.1 .1.1 Part Preparation
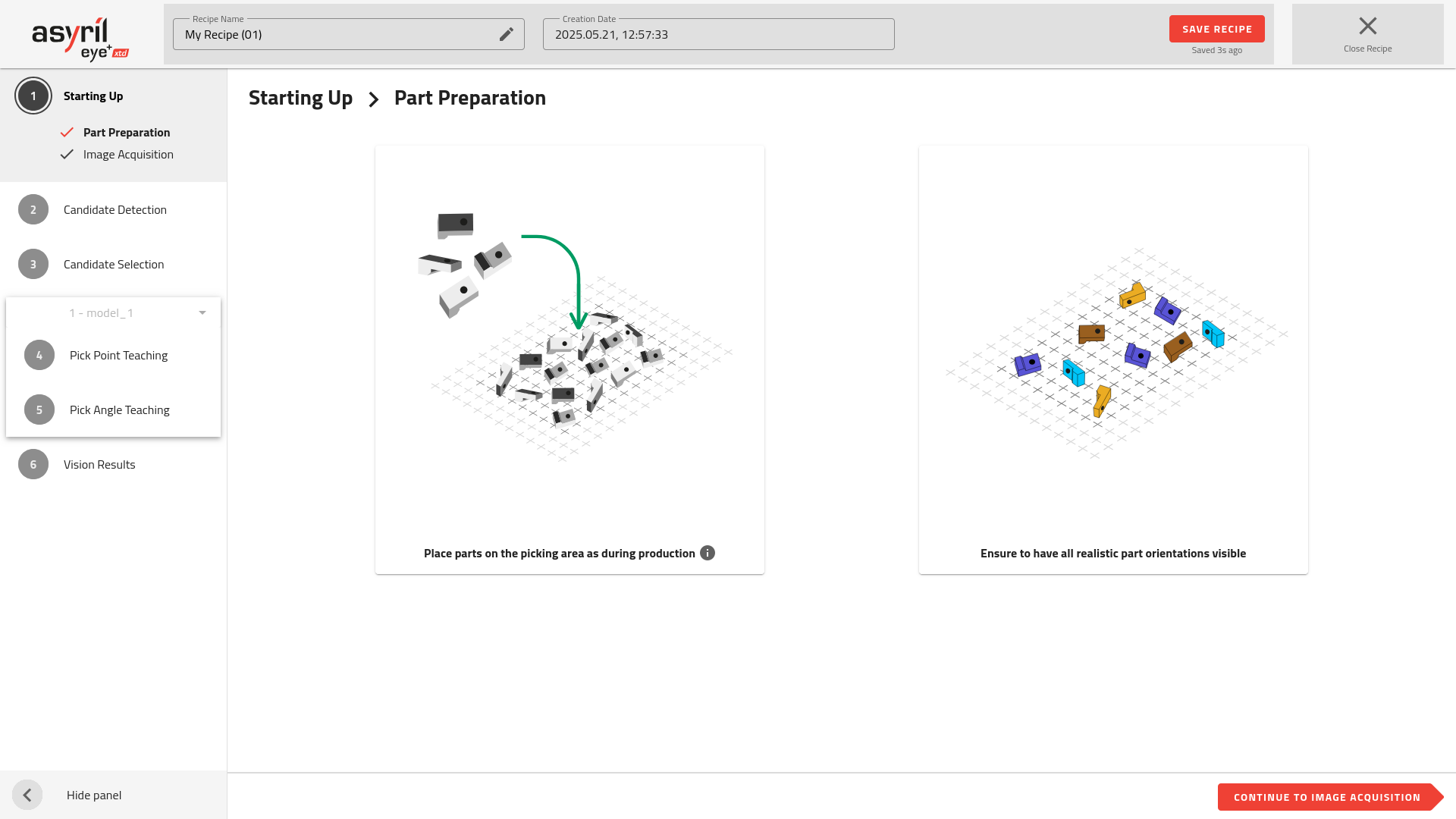
Fig. 54 Starting up - Part Preparation
Place a reasonable number of parts evenly distributed on the picking area. This should represent what you will have during production.
Depending on your application and picking area, you may need to distribute the parts randomly. Ensure that all relevant part orientations—based on your specific use case—are represented in the image. In some applications, covering only a subset of orientations may be sufficient:
Good orientation: The orientation of the part required for the robot pickup.
Bad orientation: All other orientations of the part that are not suitable for robot pick-up.
Tip
Make sure to have all realistic possible orientations represented. This is important to ensure that your recipe will be robust enough during production.
Multi-model
Important
Ensure that at least one part is clearly visible in the image for each model. This reference part is required to teach the pick point and pick angle for every model. If any model is missing from the image, you will be blocked later in the recipe creation process and will need to return to this step to reacquire the image.