警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .4.4 結果
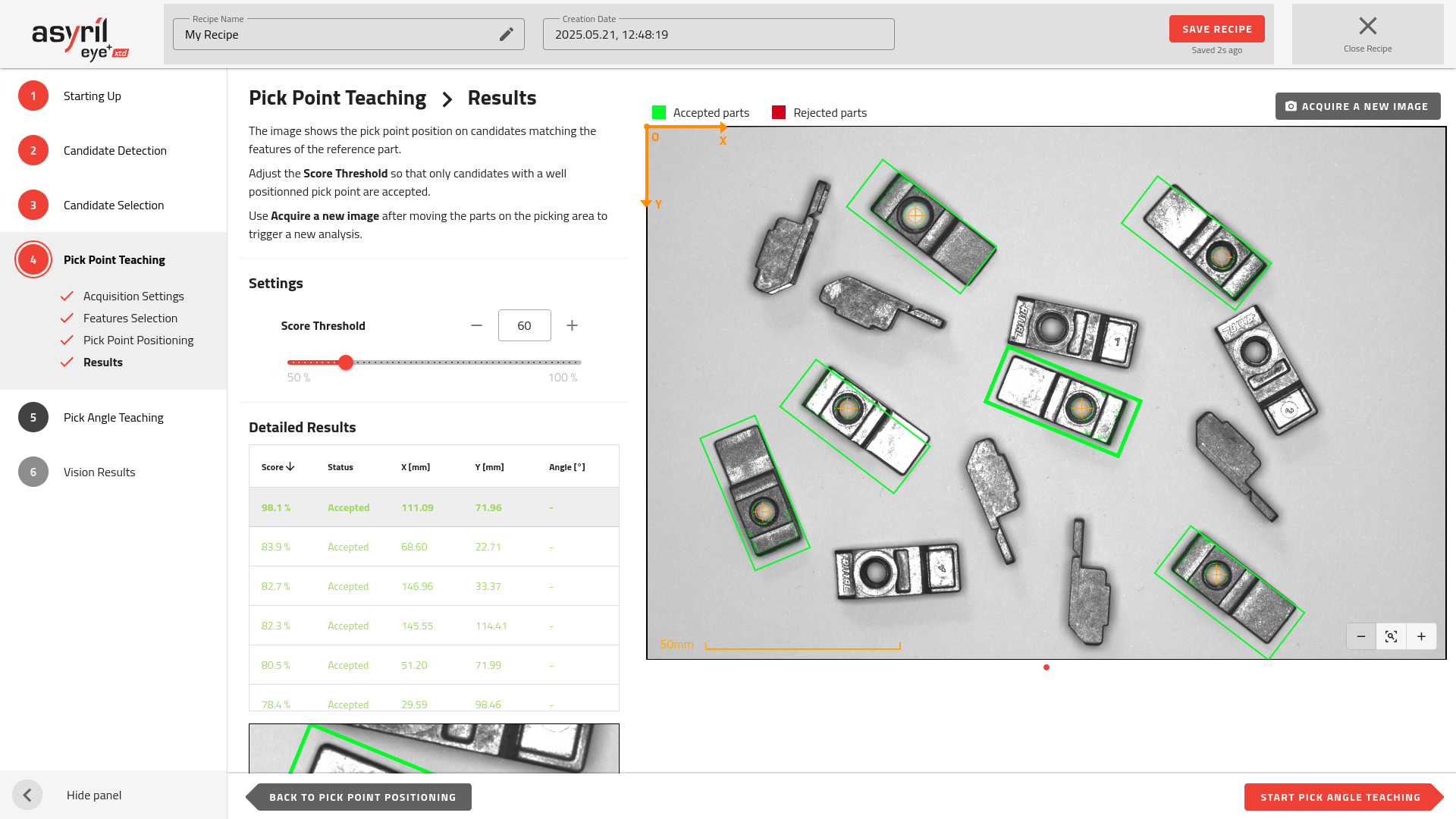
図 96 ピックポイントの学習 - 結果
このステップでは、選択した特徴で定義された 参照モデル が、他の適当な候補とどれだけ一致しているかを評価します。
参照モデルは回転・整列され、各部品で検出された特徴と最適に一致する位置を探します。これにより、部品の向きが異なっても一貫して正確なピックポイントの位置決めが可能になります。
それから、システムは定義したピックポイントを使って、X 座標と Y 座標をロボットに返します。
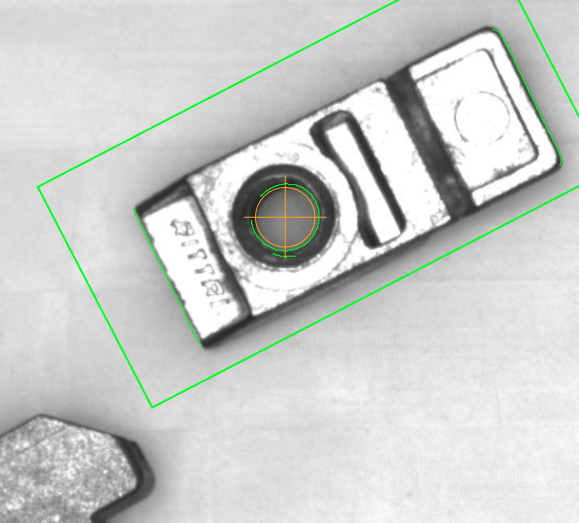
図 97 適当な候補を1つズームする
ヒント
ピッキングエリア上の部品を手動で動かしてから 新しい画像を取得する ボタンを押すと、ピックポイント異なったポジションでも常にしっかりと検出されるかどうかをチェックすることができます。
各候補には スコア が付与され、その特徴と参照モデルとの一致度(%)を表します。スコアが 100% なら完全に一致しています。
ヒント
結果テーブルでスコア順に部品を並べ替え、高スコアの部品のみが受け入れられているか素早く確認しましょう。しきい値を調整して、正確に検出された部品(緑の長方形で強調表示)だけを残すようにしてください。