警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .1.1 パーツの準備
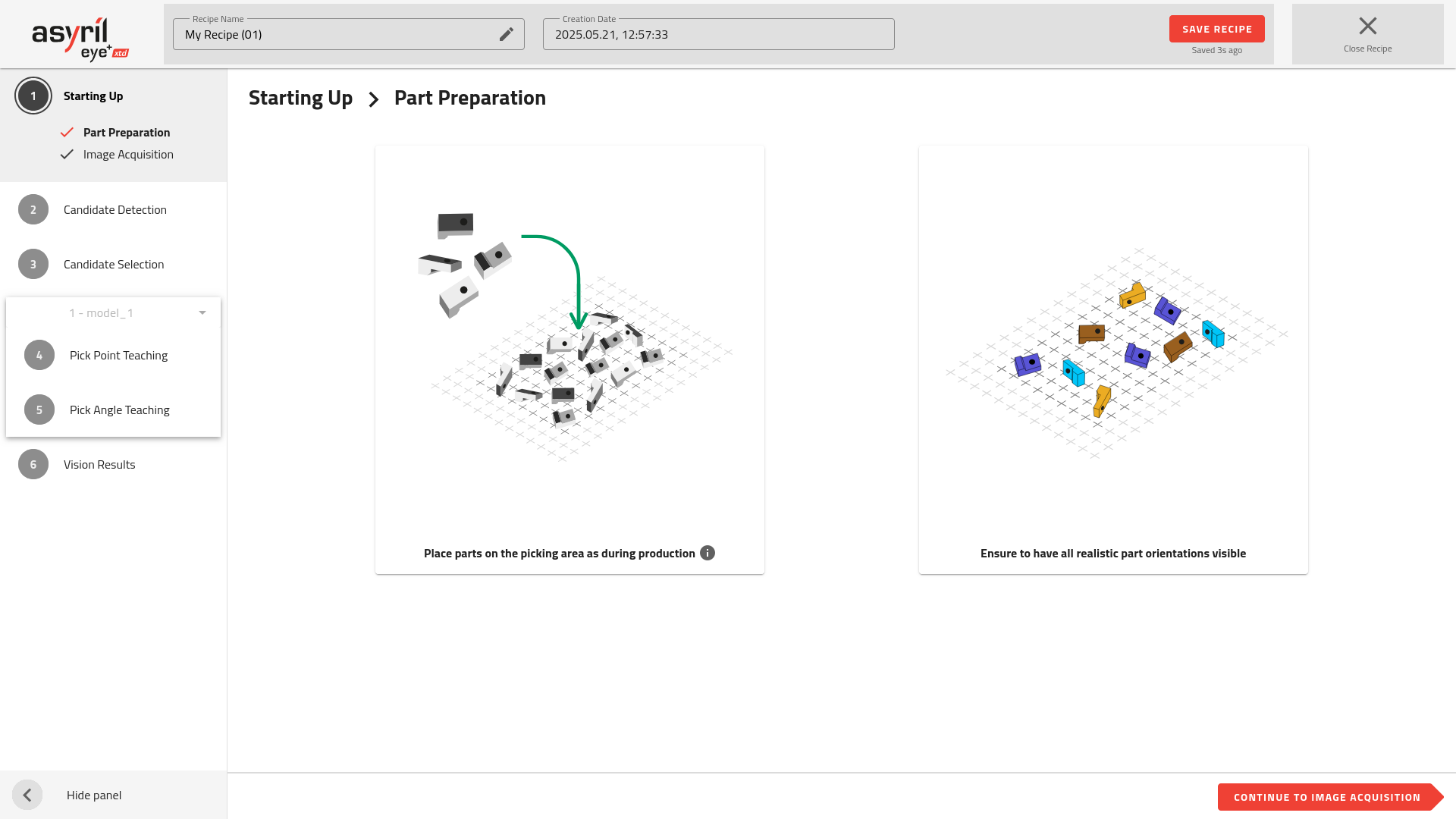
図 54 立ち上げ - パーツの準備
ピッキングエリアに部品を適量、均等に配置してください。これは実際の自動運転時の状況を反映するようにしてください。
用途やピッキングエリアによっては、部品をランダムに配置する必要があります。特定の使用ケースに応じて、すべての重要な部品の向きが画像に含まれていることを確認してください。用途によっては、一部の向きだけをカバーすれば十分なこともあります。
適当な向き とは、ロボットのピックに適した向き・表裏のことです。
不適当な向き とは、ロボットのピックに適していない向き・表裏のことです。
ヒント
現実的に考えられるすべての向きを網羅していることを確認してください。これにより、自動生産時にレシピが十分に安定して動作します。
マルチモデル
重要
各 モデルごとに少なくとも1つの部品が画像に明確に映っていることを確認してください。この参照部品は、各モデルのピックポイントとピック角度を学習するために必要です。画像にモデルが欠けていると、後のレシピ作成で進行できず、このステップに戻って画像を再取得する必要があります。