警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .2.3 結果
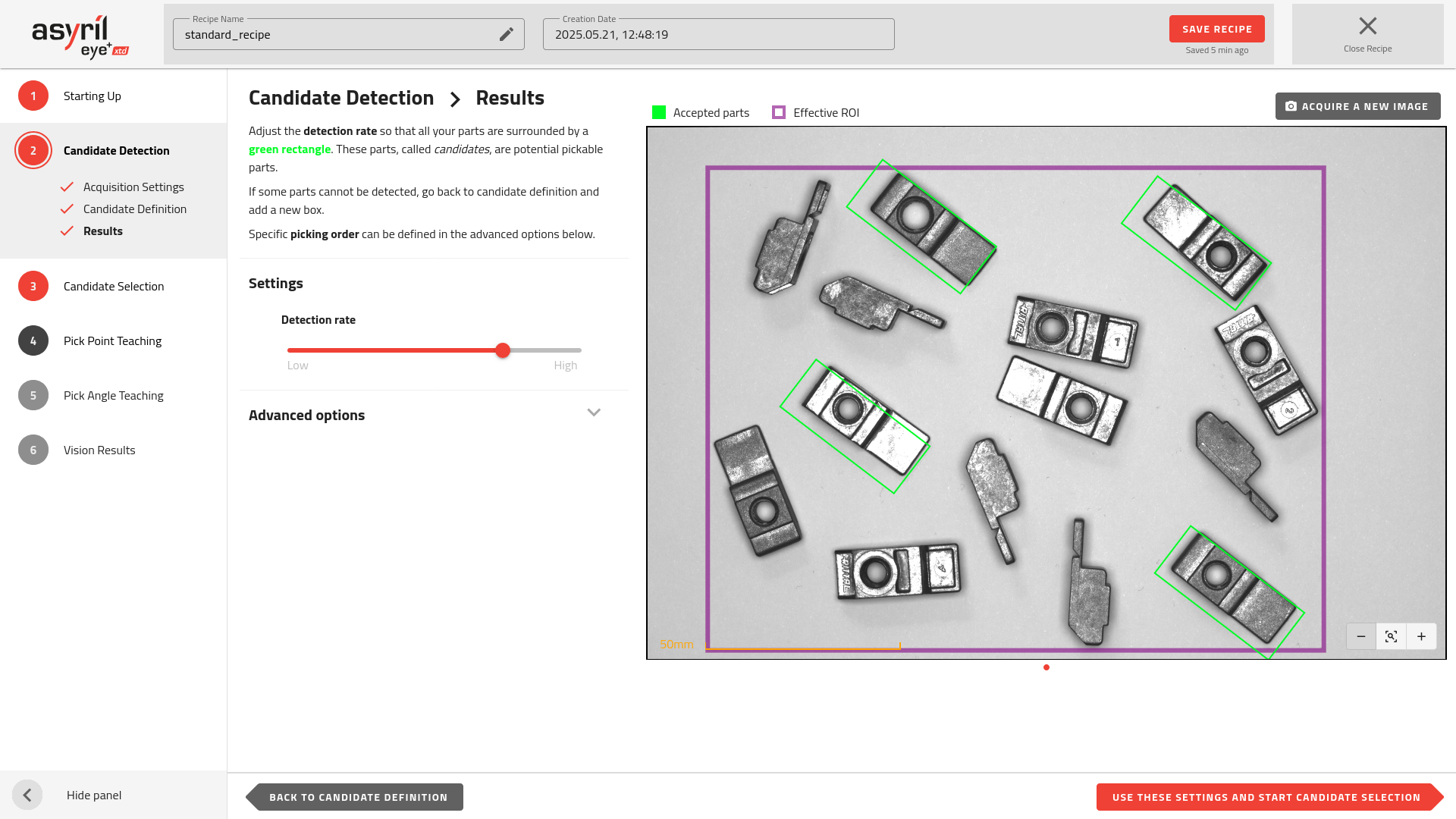
図 64 候補の検出 - 結果
結果 ページには、前のステップで定義した候補に対して実行された候補検出アルゴリズムの結果が表示されます。検出された部品は 緑色の長方形 で示され、ピック可能な部品の可能性を表す 候補 として扱われます。
部品が検出されない場合は、まず 検出率 を上げてみてください。それでも問題が解決しない、または望まれない物が検出される場合は、 2.2 候補の検出 に戻り、追加の候補の検出ボックスを追加しましょう。
重要
このステップ完了後に部品が緑の四角形で囲まれていない場合、それらの部品は次のすべてのステップで破棄されます。すなわち、部品のボジションが変更されない限り、ロボットにピックされないことに注意してください。
ヒント
アジキューブ上で手動で部品を移動させてから ボタンを押すと、新しい画像を解析して、候補の検出がうまくいっているかどうかを確認することができます。
注釈
結果画像には、 関心領域(ROI) が紫色の長方形で表示されます。ピッキングエリア全体をしっかり囲んでいることを確認してください。
高度なオプション
ピックの順番
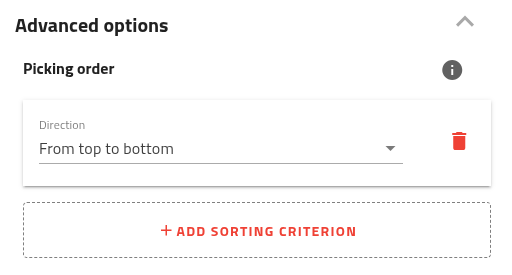
図 65 片方向のピッキングの順番の設定済み
*ピッキングの順番*は、 EYE+ XTD が自動運転時に座標を返す順序を定義します。これにより、ロボットの動作経路を最適化したり、特定の方法でピッキングエリアをクリアするような高度なシナリオを実行できます。
最大2つの並べ替え基準を設定でき、全体的な方向やグリッドベースの順番を指定することが可能です。利用可能な並べ替えオプションは以下の通りです:
上から順に
下から順に
左から順に
右から順に
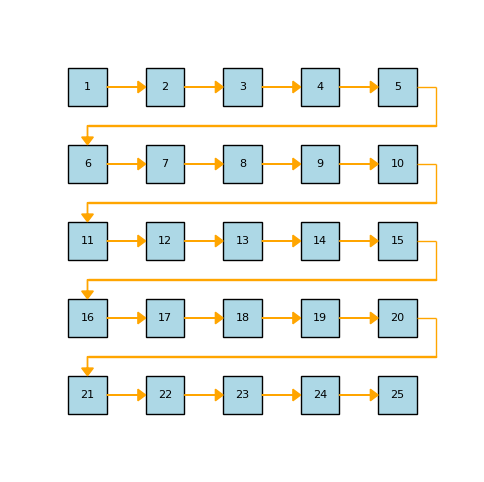
図 66 ピッキングの順番の例:1. 左から右へ 2. 上から下へ
少なくとも1つの基準を選択すると、ピッキングの順番が結果画像上に表示されます( 図 67 )。

図 67 表示されたピッキングの順番の結果:1. 上から下へ 2. 右から左へ
注釈
ピッキングの順番が定義されていない場合、部品はピッキングエリアの中心からの距離で自動的に並べ替えされ、最も近い部品から順番にピックされます。