警告
これは、古いバージョンのドキュメントです。 最新の情報をご覧になりたい場合は、次をご覧ください。 1.1 .2.1 画像取得の設定
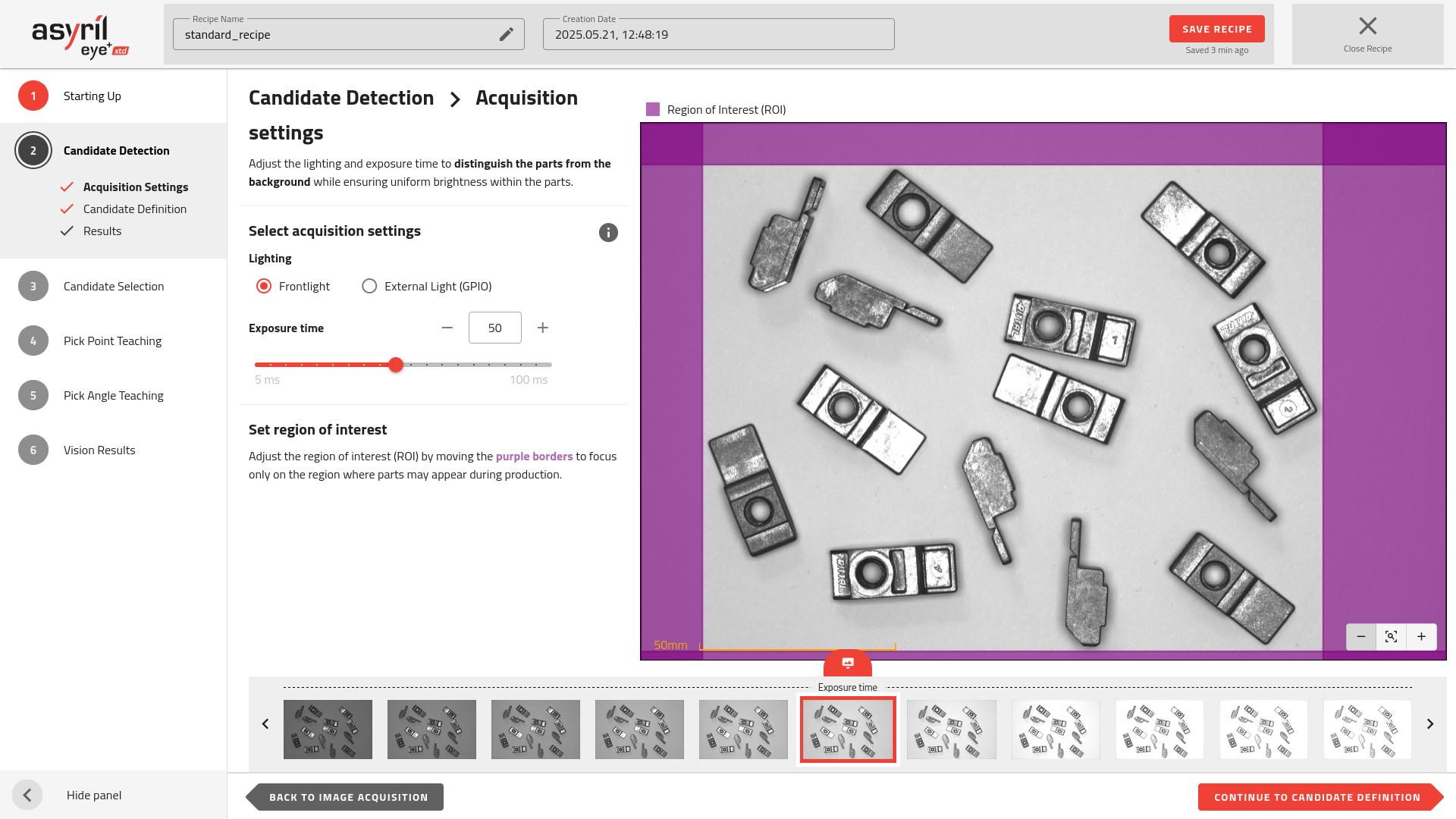
図 58 候補の選定 - 画像取得の設定
画像取得の設定 ページでは、部品の視認性を高め、背景との識別をしやすくするための照明や露光設定を行えます。このステップは、次のウィザードでの候補検出を最適化するために非常に重要です。
画像取得の設定を選択する
照明
照明のタイプは、部品と作業環境に応じて適切に選択してください。適切な照明を選ぶことで、不要な要素の視認性を最小限に抑えながら、部品の検出精度を最適化できます。
部品を効果的に検出するには、照明によって部品の輪郭やエッジが強調され、ピッキングエリアとのコントラストが最大化される必要があります。EYE+ XTD は 、AIアルゴリズム を活用して、定義された領域内の部品を識別・位置特定します。
ほとんどのステップでは、照明の種類や設定を調整して、検出プロセスを特定の要件に最適化できます。デフォルトの照明設定は フロントライト で、多くの設定で使用可能です。加えて、アプリケーションによって、外付けライト 接続でき、バックライト、サイドライト、またはその他のタイプとして設定することも可能です。
フロントライト(初期設定)
フロントライト は標準の照明オプションで、通常利用可能です。特に、不透明またはやや反射性のある部品の表面の特徴やエッジを検出するのに効果的です。
注釈
反射の多い環境では、フロントライトが眩しい反射を引き起こすことがあります。これを軽減するには、偏光フィルター を使用して反射を抑え、検出率と精度を向上させることを検討してください。
外付けライト(オプション)
追加の照明が必要な場合は、外付けライト をセットアップに接続することができます。この照明ソースは、アプリケーションの要件に応じて設定可能です。
バックライト:シルエット検出に最適な照明です。この照明タイプは部品の輪郭を際立たせ、ピッキングエリアの背景との強いコントラストを生み出します。特にエッジが明確に強調されるため、候補検出に効果的です。
サイドライト:表面の質感を強調したり、複雑な形状のエッジを識別するのに役立ちます。質感のある部品や層状の部品で、影が特徴検出を助ける場合に適しています。
露光時間
露光時間とは、画像を取得する際にカメラが受光している時間のことです。露光時間が長いほど画像が明るくなります。
露光時間の増減は、部品とプレートのコントラストに影響を与えます。部品を検出するために最適な露光時間を見つけてください。

図 60 フロントライトを使った露光時間の異なる画像
共通の問題
画像取得プロセス中に部品の見えにくさの問題が発生することがあります。よくある問題は次の二つです:
眩しい反射
これは照明が強すぎたり、光沢のある表面で反射したりして、明るい斑点ができ、部品の細部が見えにくくなる現象です。
この問題を解決するには、露光時間を短くする、可能であれば照明の角度を調整する、または光沢の強い部品にマット仕上げを施してください。
さらに、カメラレンズに 偏光フィルター を使用すると、まぶしさを大幅に軽減できます。偏光フィルターは反射を引き起こす特定の光波を遮断し、光沢のある部品のコントラストと視認性を向上させます。
最適な結果を得るためには、光源にもカメラのフィルターと整列させた 偏光フィルターを装着する必要 があります。この組み合わせは クロスポラリゼーション と呼ばれ、カメラのレンズフィルターだけを使用する場合よりも反射を効果的に抑えます。
露光不足
これは照明が不十分な場合に発生し、部品の縁がはっきり見えない暗い画像になります。
この不具合を解決するためには、プレビューで部品がはっきり見えるようになるまで露光時間を徐々に延ばしてください。
露光過度
露光過度は画像が明るすぎるときに発生し、部品の輪郭が失われ、詳細が "白飛び" してしまいます。これは通常、露光時間が長すぎるか、照明が強すぎる場合に起こります。
この問題を解決するには、 露光時間を徐々に短く して、部品の輪郭がはっきり見えるようにします。または、照明の明るさを下げる か、調整できない場合は 直接反射を避けるように位置を変えます 。
ヒント
露光を微調整する際は、部品が十分に明るく照らされつつ、輪郭が見え、画像に "白飛びがない状態" を目指してください。
関心領域(ROI)を設定する
デフォルトでは、レシピで使用される ROI(関心領域)はビジョンキャリブレーションのプロセスから引き継がれます。ただし、用途に応じて変更することで、検出精度を向上させることができます。
Adjusting the ROI allows you to define the specific area where EYE+ XTD will search for candidates. This is done by moving the virtual barriers (purple borders) in the image on the right to include only the relevant picking area.
確実な部品検出と安定したピッキング性能を確保するためには、次の点に注意してください。
ロボットやグリッパーが実際に使用する ピッキングエリアに合わせて、ROI を調整してください。
空の角やコンベアの端など、 無関係な領域を除外 して、誤検出を防ぎましょう。
明確に定義された ROI は処理時間を短縮し、アルゴリズムが有用な視覚情報のみに集中できるようにします。